教材link
复数 (Complex Number ) 与矩阵旋转
四元数和复数有非常大的相似度
复数的常见运算可以等价为矩阵的常见运算
任何一个复数
其相应的加法与乘法都可以等价过来
我们知道二维旋转矩阵的公式是
这个矩阵也可以被表示成一个复数,即
那么这时向量
旋转过程即被表示为
极坐标与复数
欧拉公式
之前完全就是只听说过名字
对任意实数x,都存在
另x=
证明可以使用我们的好朋友泰勒公式,对
欧拉公式给出了复平面中对圆的描述
所以我们可以将复数
如此复数就可以被一个缩放因子r和旋转角
旋转公式也就被表示为
由于复数乘法满足交换律,因此旋转是可以复合操作的
三维空间的旋转
假设我们有一个穿过原点的旋转轴
(如果实际操作中旋转轴不穿过原点,可以先把旋转轴移动到原点,转完再移回去,这就是MVP变换的思想之一了)
任何要对着这个轴旋转的向量都可以被分解到两个方向——垂直
平行u方向什么都不用做,垂直u方向可以被降维为2D平面中的旋转
2D平面的基向量由
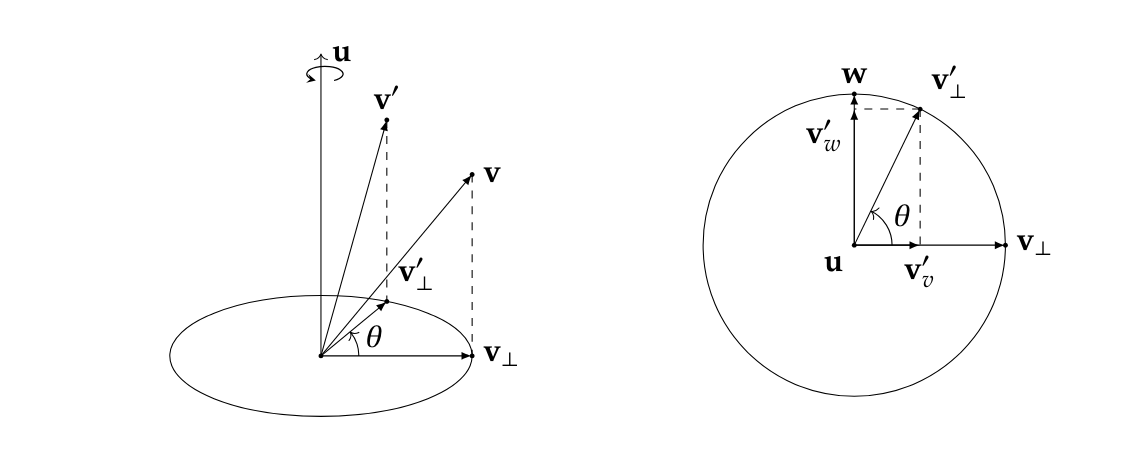
从而有
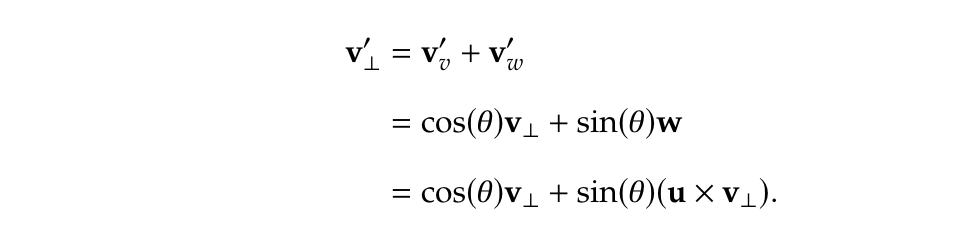
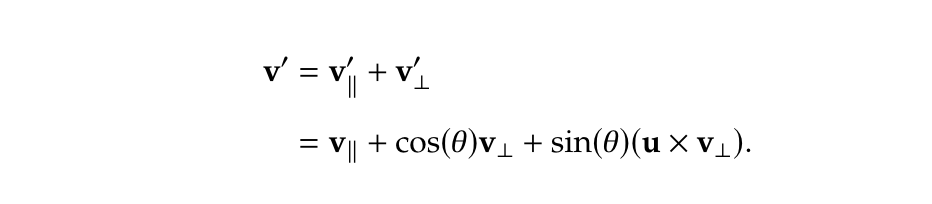
配合平行的分量就是
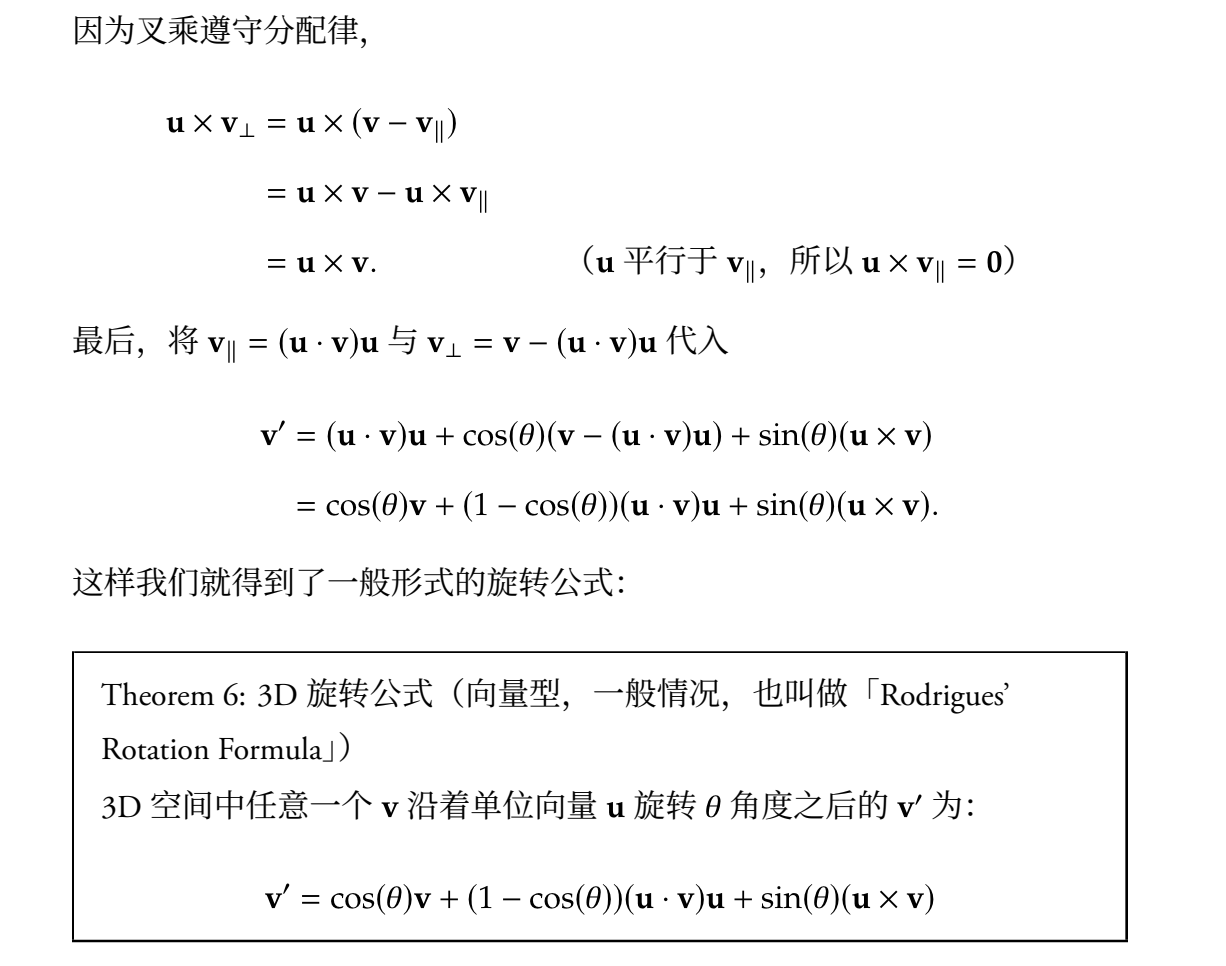
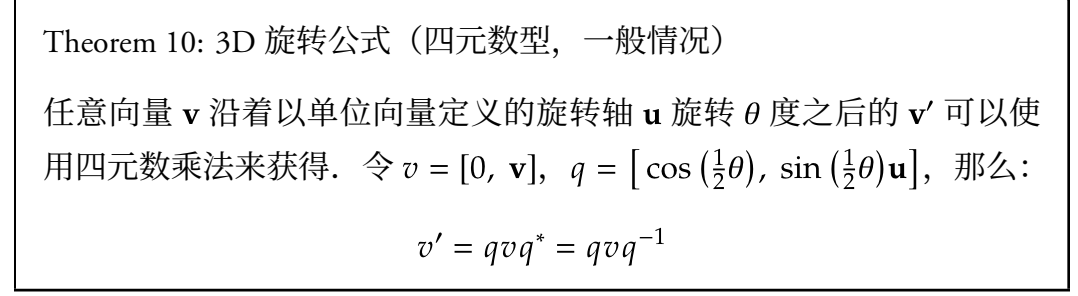
四元数与旋转
我们之前推出过这个公式
四元数的性质告诉我们可以直接将
同时我们还可以变换
根据四元数的乘法
可以得到
所以叉乘也能被换成纯四元数(因为它们垂直呢)
𝑣 ′ ⊥ = cos(θ)𝑣⊥ + sin(θ)(𝑢𝑣⊥).
把
𝑣 ′ ⊥ = cos(θ)𝑣⊥ + sin(θ)(𝑢𝑣⊥) = (cos(θ) + sin(θ)𝑢)𝑣⊥.
就可以发现(cos(θ) + sin(θ)𝑢)也是个四元数
记作
补上平行的分量
𝑣 ′ = 𝑣 ′ ∥ + 𝑣 ′ ⊥ = 𝑣∥ + 𝑞𝑣⊥.
同时还可以直接计算证明两个引理


如此依赖我们可以自定一个四元数
由于pp*(共轭)=1
我们可以把之前的式子变成
𝑣 ′
= 𝑝𝑝∗ 𝑣∥ + 𝑝𝑝𝑣⊥
= 𝑝𝑣∥𝑝 ∗ + 𝑝𝑣⊥𝑝 ∗
= 𝑝(𝑣∥ + 𝑣⊥)𝑝 ∗ .
最后就得到了
看起来这个公式还只是万里征途的第一步,今天就到这里吧